ノースウェスタン大学の研究者が率いるチームが、ロボットをゼロから設計できるAIを開発しました。研究チームはAIに、平らな面を歩行できるロボットをデザインするという簡単な課題を与え、AIがデザインしたロボットを実際に作って歩行できるのか実験しました。このAIについて、海外メディアの「The Robot Report」が解説しています。
*Category:
26秒でAIがオリジナルロボットを設計
AIに「歩行ができる物理的な機械をデザインする」というプロンプトを与えました。その後はそれ以上の情報を与えていません。するとAIプログラムは、石鹸ほどの大きさのロボットを設計しました。最初の試作では、ロボットはピクピク動くことはできましたが、歩くことはできませんでした。次に、AIはその設計を評価し、歩行ロボットを設計するという目標を達成できなかったと判断すると、新しい設計に取り掛かりました。
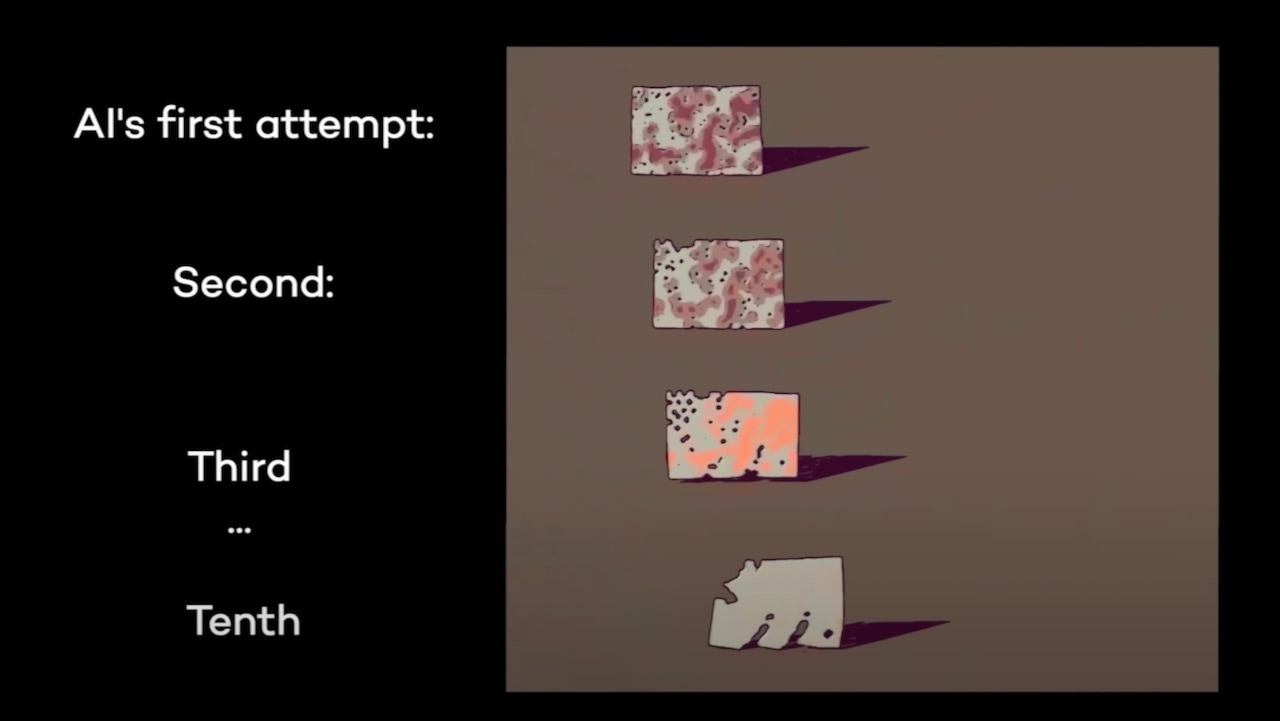
AIはわずか9回の試行で、1秒間に体長の半分の長さで歩けるロボットを作り上げました。これは人間の平均的な歩幅の約半分のスピードです。そしてこのプログラムに要した時間はわずか26秒でした。このAIプログラムは、どんな種類の歩行ロボットでも設計することができましたが、「脚を設計する」という進化と同じ結論に達しました。この研究を主導したノースウェスタン大学のサム・クリーグマン氏は次のように述べています。
It’s interesting because we didn’t tell the AI that a robot should have legs.It rediscovered that legs are a good way to move around on land. Legged locomotion is, in fact, the most efficient form of terrestrial movement.
— 引用:THE ROBOT REPORT訳:面白いのは、私たちがAIにロボットは脚を持つべきだと指示しなかったことです。AIは、脚が陸上を移動するのに適した方法であることを再発見したのです。脚を使った移動は、実際、陸上で最も効率的な移動形態なのです。
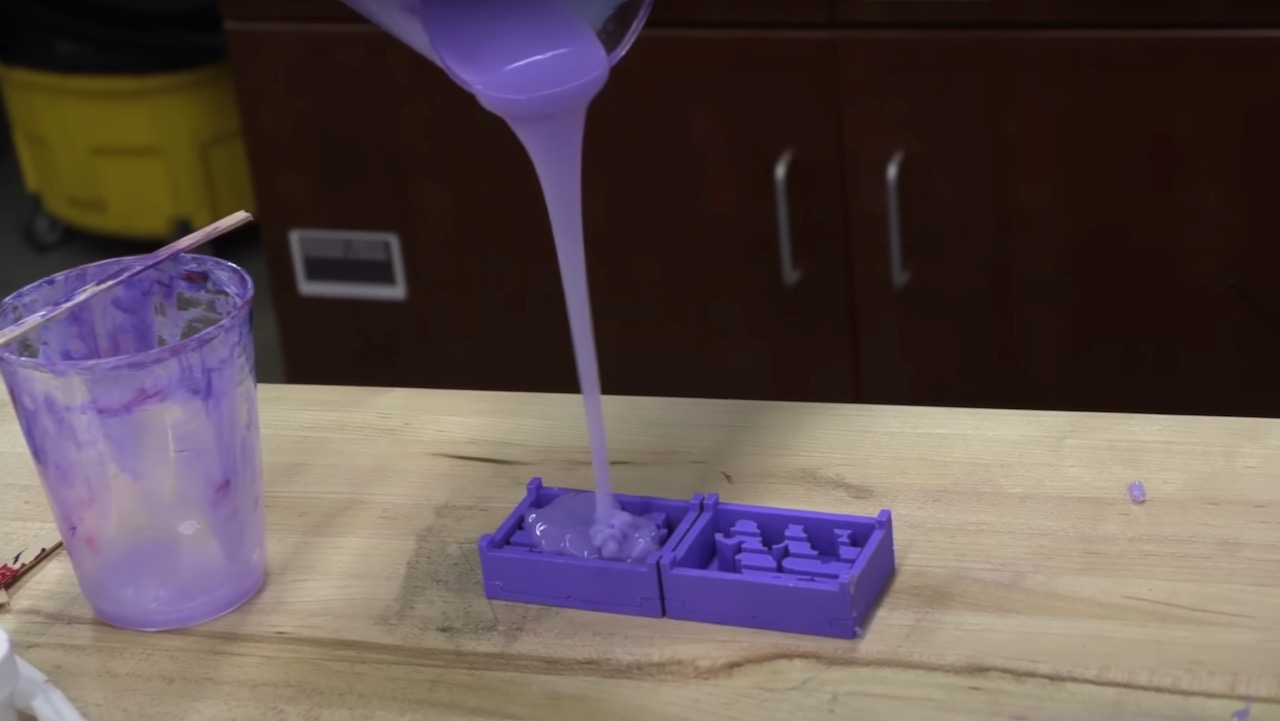
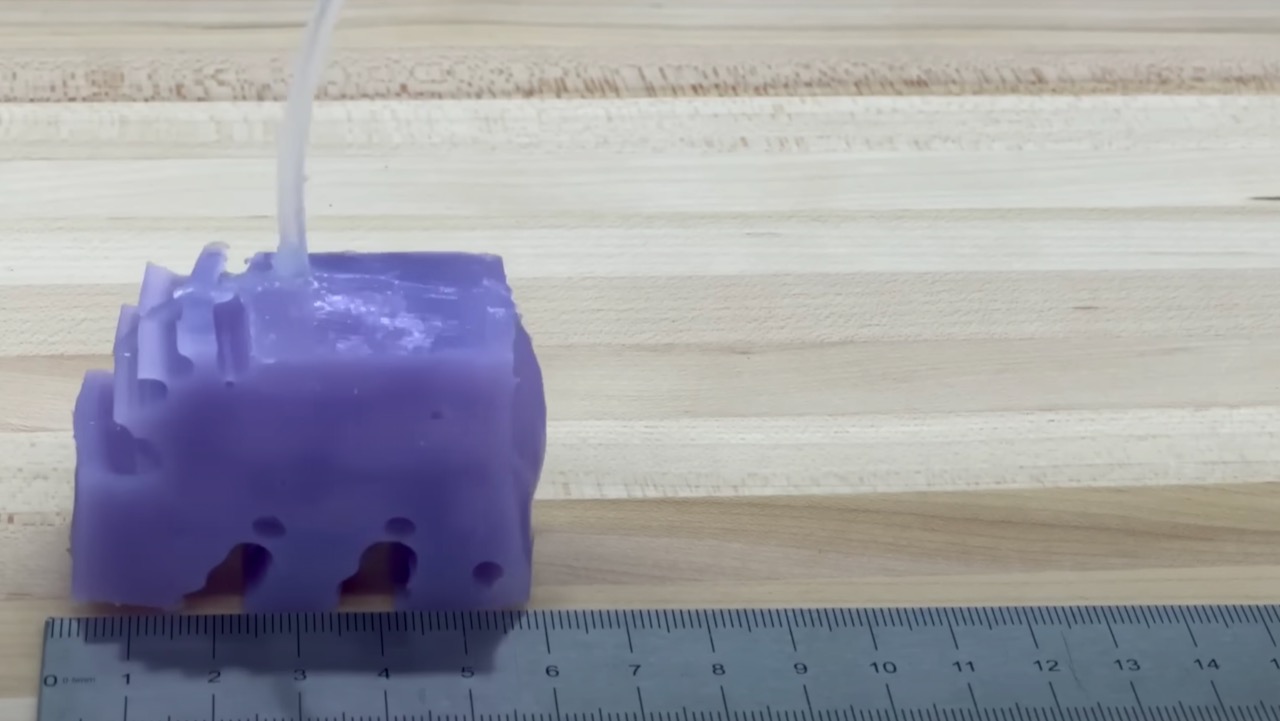
AIが設計したロボットは、3Dプリンターを使って実際に作成し、歩行できるかどうか実験が行われました。3Dプリーンターが作成した型に液状のシリコンゴムを入れ、数時間硬化させます。そして、そこに空気を入れることでロボットが動くという仕組みです。ロボットの胴体から空気が抜けると、脚は収縮します。つまりロボットに空気を送り続けることで、ロボットは膨張と収縮を繰り返し、ゆっくりと歩行できるのです。
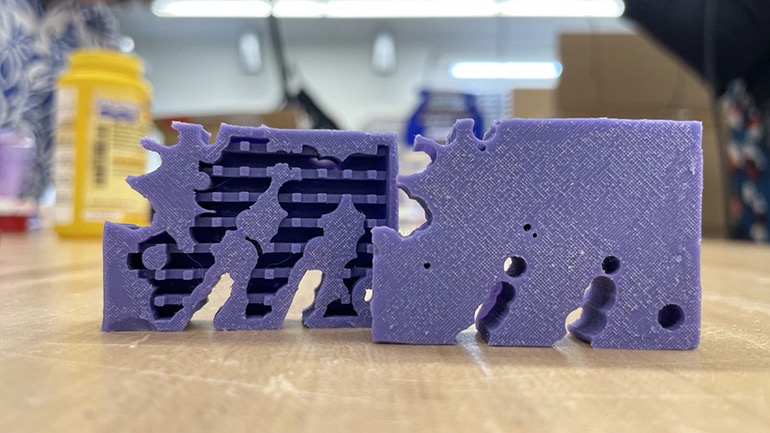
このロボットは、3本の不揃いな脚、背中に沿ったフィン、そして平らな顔を持ち、胴体全体にはたくさんの穴があいています。この穴については完全には解明されていませんが、おそらく重量を軽減し柔軟性を増すことで、ロボットが足を曲げて歩くことを可能にしているのではと考えられています。
これは、研究者たちの新しいAIアルゴリズムの始まりに過ぎません。将来的には、このアルゴリズムが成熟し、適切なプロンプトがあれば、人間が思いつかないようなものも含め、様々なタイプのロボットを作成できるようになると研究チームは期待しています。またこのAIプログラムは、大量のエネルギーとデータセットを必要とするスーパーコンピューターではなく、軽量のパーソナル・コンピューター上で動作することができるという点でも注目されています。
- Original:https://www.appbank.net/2023/11/20/technology/2660600.php
- Source:AppBank
- Author:記事班02テクノロジー
Be the first to comment